“You are Here” rather than “You are Near.” Sensor Fusion & Defining the Best Vehicle Positioning Solutions
In our fast-paced technology-driven environment, you expect accuracy of information. If you need directions from your position to another location, you expect to receive directions based on your current location, not from a location two blocks over. Today, accurate positioning data is crucial for a wide range of applications, from vehicle navigation systems to locating a ride-share scooter. However, achieving an accurate location is no simple task, particularly when considering the many changing circumstances in which these vehicles or devices find themselves.
Relying on a single piece of technology does not guarantee consistent outcomes in all circumstances. Enter sensor fusion, a ground-breaking technology for positioning applications that combine the advantages of various sensors to get around the shortcomings of each technology on its own.

Defining Sensor Fusion and the Importance of Positioning in Modern Applications
Sensor fusion in positioning applications refers to the process of combining data from multiple sensors to obtain a more accurate and comprehensive understanding of the vehicle's or device's location or state. In the context of mobility, such as GPS navigation, autonomous vehicles, commercial robotics, or even e-bikes and e-scooters, sensor fusion plays a crucial role in enabling these systems to identify their position even in environments that challenge traditional positioning systems.
Various types of sensors are used in mobility applications, including cameras, radar, and more. Each sensor has its strengths and weaknesses, and no single sensor can provide a continuous, reliable, and accurate positioning solution in all environments.

How is Sensor Fusion Impacting Lives Today?
For consumers, sensor fusion is creating more effective navigation and location systems for vehicles and smartphones. But it can also be found in autonomous and semi-autonomous cars, automated mobile robots (like delivery robots), with new uses being discovered daily.
Types of Sensors Used for Absolute & Relative Positioning
So, what is the difference between Absolute and Relative positioning? Absolute positioning, as the name suggests, specifies you or your vehicle’s location based on a fixed point or known reference system, such as latitude, longitude, and altitude — you are here!
Relative positioning, in contrast to Absolute positioning, is the method of estimating your current position based on a previously known position. Dead Reckoning is a classic example of relative positioning, which uses the initial position, plus direction and speed to estimate a vehicle's or device’s new position.
Each has its purpose (and limitations) but is highly effective when used in tandem.
Types of Absolute Positioning Sensors
- ● GNSS (Global Navigation Satellite System) or GPS– Most common in mobility sensor fusion applications
○ Note: GNSS refers to all navigation satellite systems, where GPS is more US-specific - ● WiFi Positioning
- ● Cell Tower Triangulation
- ● Geomagnetic Positioning
- ● Perception positioning against a map such as from cameras, lidars or radars
Types of Relative Positioning Sensors
- ● Inertial-based positioning – Gyroscope and Accelerometer
- ● Barometer for relative height
- ● Lane following by vision sensors

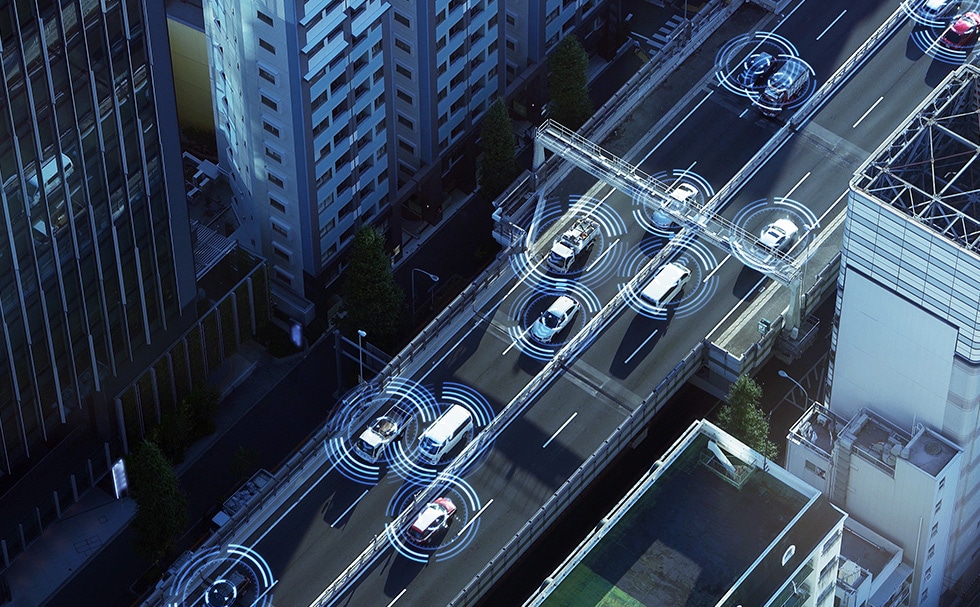
Challenges Faced in Vehicle Positioning and the Role of Sensor Fusion
Focusing on mobility applications, individual absolute and relative positioning solutions result in ambiguity and uncertainty. Think of it in terms of using GPS when driving in a tunnel. You may not have positioning capabilities inside the tunnel and could conceivably miss an upcoming exit within the tunnel.
Sensor Fusion Solutions Focused on Mobility
By combining data from multiple sensors to obtain a more accurate and comprehensive understanding of the movement of the vehicle, TDK is redefining the reliability and robustness of positioning systems for vehicle and ride-share applications. (*The following product information includes products under development.)
"TDK’s sensor fusion is clearly the way of the future for improved accuracy and reliability of all positioning applications, especially those that are autonomous or semi-autonomous. It's no longer about providing the most accurate positioning solution; it’s about providing an accurate AND reliable solution that can be integrated into other navigation or control systems.”
Chris Goodall, Managing Director of Trusted Positioning, a TDK group
company
RIDE
Focused on the ride-sharing service provider aspects of micro-mobility, TDK’s RIDE provides accurate vehicle heading and position which allows companies to maintain their fleets in an organized way. This minimizes scooters and bikes being left carelessly on sidewalks where they block walkways and create potentially unsafe conditions. RIDE is also crucial for monitoring user behavior, including erratic riding, lax docking, and crashes.
TRACK
Premium software that tracks vehicle position in GPS denied areas. TRACK is superior at managing vehicle locations in the most challenging environments, like parking garages, downtown areas with tall buildings, and tunnels. TRACK, TDK’s inertial dead reckoning software, works with various hardware, processors, and sensors to provide the industry-leading solution.
AUTO
Designed for autonomous and semi-autonomous vehicles and robot applications. TDK’s AUTO integrates an automotive-grade IMU, vehicle speed, high-precision GNSS, and perception sensors, all precisely timed to deliver higher accuracy and position integrity for lower-cost to wheeled vehicles.

What Sets TDK’s Solutions Apart
Often, dead reckoning or inertial navigation technology is "one-size-fits-all." Companies offer a solution for a specific combination of sensors, and integrators are forced to work with the standardized hardware regardless of the use case. With sensor fusion software at the core of this technology, TDK is hyper-focused on delivering the best solution optimized for each application. TDK is the first company to provide specific products to support different use cases, e.g., RIDE for e-bikes, TRACK for vehicles, and AUTO for autonomy.
There are also ancillary benefits with TDK’s software, like the ability to detect driving dynamics, provide anti-theft technology, or tow-detection solutions.
TDK also partners with its manufacturing customers to develop capabilities based on the positioning data provided. If a customer wants to incorporate particular sensors or GPS hardware, TDK can adapt their software as needed. This would negate the need for specific hardware and integration into the client’s systems.
Future Trends in Sensor Fusion for Automotive Positioning
As the software-enabled vehicle (e.g., vehicles designed and primarily managed by software that can be updated) becomes more prevalent, you can expect to see more intelligent mobile platform capabilities taking center stage. As a top-tier disruptor in the global auto landscape, software-defined vehicles are transforming how we drive and interact with our vehicles.
Expect to see technologies like 5G connectivity continuing to improve positioning and navigation capabilities that are easy to update, transfer, and integrate with tomorrow's intelligent vehicles.
Trusted Positioning, a TDK group company, with over 130 patents worldwide, will continue to be at the forefront of mobility and accessibility. Contact TDK today to learn more about our technology.

Chris Goodall is currently the Vice President of the Positioning and Monitoring Systems Business Unit of TDK. Chris leads the team toward design, creation, and business development for next-generation positioning software for indoor and autonomous platforms
Chris co-founded Trusted Positioning Inc., a software navigation company, in 2009, which was acquired in 2014 by InvenSense Inc., and which now operates under TDK ownership. Chris served as the CEO & CTO of Trusted Positioning for 3 years and still serves as its President.
Chris has a PhD in Geomatics Engineering from the University of Calgary, he has over 50 publications related to multi-sensor navigation systems and is an inventor or co-inventor on over 20 patents.