
Topics
Vol.2 How Electricity Drives Automobile Progress ‒ Part 2 Will the Car Become the Most Familiar "Partner Robot"?
The progress of robot technology in many areas is increasingly making headlines. At the same time, cars and various other products that sustain our daily lives are acquiring new functions and becoming more convenient through the introduction of robot technology.
What is the role of a robot?
I use the expression "robot technology," but in fact, there is no official definition of the word "robot." For the sake of convenience, I will borrow from the definition of an industrial robot, and say that a robot is "a machine controlled by a computer program and capable of automatically and autonomously performing specific processes in a continuous manner." Consequently, "robot technology" refers to the particular skills and techniques necessary for creating such a robot.
In other words, robot technology can be seen as encompassing the evolution from building "tools" which are an extension of the body that enable the performance of tasks not possible to the unaided human physique or that enhance the efficiency of work, to "agents" that can perform the work instead of humans. And consumer electric appliances and automobiles are the two areas where the move to the agent pattern is currently most in evidence.
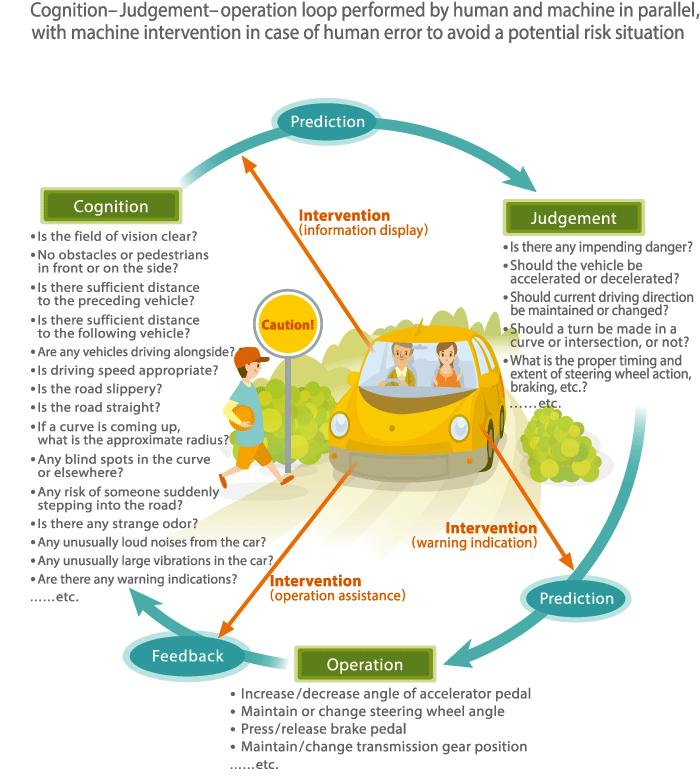
Many of the new technologies that were adopted for the automobile in the past decade or so are related to robot technology. In concrete terms, more and more of the basic functions that are essential to driving a car, namely cognition, judgement, and operation, are being performed autonomously to compensate for possible human errors.
A good example is autonomous emergency braking (AEB), a function noted for being increasingly incorporated even in compact and subcompact cars. With this function, which is also called collision prevention, the system detects a stationary or low-speed object in the vehicle's path and automatically applies the brakes to avoid hitting the object if the system determines that the driver is not braking or if the braking force is insufficient.
Systems that can contribute more to safety than would be assumed from statistical data
It goes without saying that no driver is intentionally going to hit a car or another object in front. Accidents involving such collisions are the result of errors in the "cognition – judgement – operation" process. Approaching the car in front too closely can be due to a cognition error, such as not keeping one's eyes on the road ahead, or the result of a judgement error in wrongly estimating the distance or speed, or the result of an operation error such as forgetting to brake, not braking with enough force, or one's foot slipping off the brake pedal.
Autonomous emergency braking is a system that compensates for such human errors in order to avoid safety risks. Using means such as a radar or camera, cars and other objects in front are detected, and the distance and speed difference of the own vehicle in relation to the detected object are constantly monitored. When the system determines that there is a risk of collision, it forcibly applies the brakes to avoid such an occurrence.
Systems for automatic braking began to appear in luxury cars from about the early 2000s. Initially, they were called "collision damage mitigation braking systems" and did not extend to fully stopping the vehicle. In such a system, the distance and speed difference to the preceding vehicle are constantly monitored, and when entering a certain danger zone, the driver is alerted for example by sounding a warning tone or causing the accelerator pedal to vibrate. If the driver still does not brake and a collision seems imminent, seat belt tension is tightened to protect the occupants of the car, and the brakes are applied automatically to reduce speed as much as possible, in order to minimize the impact damage.
However, there are doubts as to whether such a system really conforms to the reality of traffic accidents. Initially, collision damage mitigation braking was based on the premise that the higher the speed at the time of a collision, the higher the risk of fatal injury. Therefore the systems were designed to operate from a speed of 15 km/h upwards with no upper limit, and to detect objects at a distance of up to about 100 meters in front of the car. Sensors therefore required expensive components such as millimeter wave radar, resulting in high overall cost and mostly limiting adoption to luxury class vehicles.
On the other hand, about 80 percent of all traffic accidents occurring in Japan are between two or more vehicles, and about 60 percent occur at speeds below 30 km/h. Furthermore, data show that more than 70 percent are due to human error. This seems to indicate that many road accidents are collisions at intersections or rear-ending such as inadvertently hitting the car in front in a traffic jam. If so, the question arises as to which capabilities can be omitted from a collision damage mitigation braking system in order to make it simpler and less costly. If such systems were to be deployed in a higher number of cars, the overall damage from accidents could most likely be reduced. This kind of thinking has led to the development of the current autonomous emergency braking systems. Systems that are active at 30 km/h or lower, and whose sensing range extends only to about 30 meters in front can be produced more cheaply, which in turn facilitates wider acceptance and inclusion in more cars. Officially accepted data from overseas have already shown that this is effective in reducing accidents and thereby contributes to public safety.
A function for controlling inadvertent acceleration is frequently bundled with autonomous emergency braking systems. This function, which can be realized through the simple addition of a computer program, is another advantage brought about by robot technology. Accidents caused by mixing up the brake and accelerator pedals are said to amount to about 7,000 per year in Japan alone. When this occurs for example in a high-rise parking facility, the car may drop from a higher deck to the ground, or the car may hit a wall or another building, often with very serious consequences. A system for controlling inadvertent acceleration is designed to monitor the situation in front of the car also while the car is stationary. If this is determined to be a wall or other obstacle in close proximity, engine output will be restricted to prevent the car from surging forward, even when pushing down the accelerator pedal strongly. While being rather low-key, such a function also is likely to make a significant contribution to the reduction of traffic accidents.
Background and expectations for the robot car
Systems implementing autonomous emergency braking hold a crucial key for the realization of a robot car that is capable of autonomous driving, in other words a car that can drive itself. There is no doubt that one of the future directions for the evolution of the automobile is the robot car.
The automobile is an indispensable part of civilized life, but on the other hand, it is also at the root of many problems that plague modern society. Foremost among these is harm to humans and damage to property caused by traffic accidents, and air pollution caused by exhaust gas. In terms of global environment protection, the consumption of enormous amounts of petroleum resources in the form of fuel is also a major cause for concern. The emergence of the robot car will not solve all of these issues completely, but it is likely to contribute significantly to their solution.
As mentioned above, more than 70 percent of traffic accidents are said to be caused by driver error. To counter this, a wide range of safety features has been developed. Some examples include anti-lock brake systems (ABS), electronic stability control (ESC) for maintaining stability and preventing skidding even on slippery roads, lane departure prevention (LDP) to warn the driver and assist in returning the car to the travelling lane, and blind spot warning (BSW) to alert the driver of vehicles approaching from the rear.
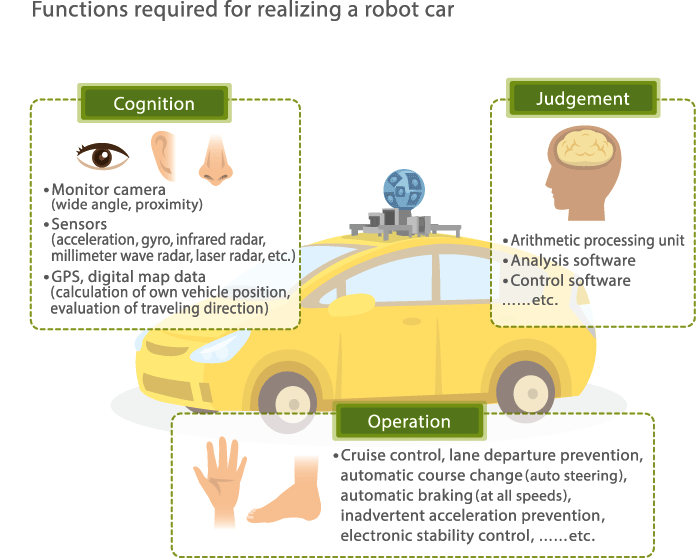
These functions may be linked to a car navigation system that precisely recognizes the current position of the vehicle, as well as to adaptable cruise control (ACC) with steer assist that controls speed to maintain a constant distance to vehicles in front and in the rear and that is capable of negotiating curves up to a certain extent automatically. Further additions are an intelligent parking assist system providing steering assistance for parallel parking or entry into a garage, and a system for automatic braking for pedestrians, bicycles etc. When all of these systems are present and can be comprehensively controlled, the elements for autonomous driving are generally assembled.
Which advantages would a robot car created in such a way bring for us? First of all, it should not be prone to mistakes in the "cognition - judgement – operation" process, which in turn can be expected to significantly reduce the number of accidents. Robot cars being road tested by Google in California are reported to have completed a combined driving distance of over 50,000 km without accidents.
But there is an interesting additional aspect to this. There were in fact two accidents. One occurred in a parking lot while the car was operated by a human driver, and in the other incident, the robot car was hit from behind by another car while waiting at a stop light. Both of these accidents were caused by humans, so they were not counted as accidents in terms of the autonomous/automatic driving experiment.
The next important aspect is the reduction of impact upon the environment. Traffic jams that occur naturally when drivers reduce speed for example on an uphill stretch or at the entrance of a tunnel can be alleviated, and speed can be maintained according to driving conditions to always achieve optimum fuel efficiency. This can be expected to significantly contribute to the mitigation of problems such as air pollution caused by exhaust gas and the consumption of petroleum based resources.
Challenges of the robot car
Another role for which the robot car seems promising is the support of "mobility disadvantaged" persons. A current trend in public administration in Japan is the strengthening of local authorities, along with higher reliance on the private sector. As a result, maintaining a proper infrastructure in remote depopulated areas has become more difficult, and the consolidation of the transportation infrastructure continues. On the other hand, commercial stores and facilities in the countryside tend to be increasingly located in centralized locations, making it necessary for citizens to provide their own means of transport for maintaining their daily life.
As a realistic solution, the reliance on private cars therefore is on the rise, but this in turn raises other questions. What about elderly persons and others who may have problems driving for example due to visual acuity and physical ability? This issue, which has been discussed from various angles, is another area where robot cars may provide a solution. Especially if "ultra-compact mobility" standard vehicles even smaller than current subcompacts should find wide acceptance, various issues may be solved.
The technical hurdles to be overcome on the way to the robot car are in fact not that high anymore. The move towards the realization of the robot car has gained considerable momentum since 2013, and manufacturers including Mercedes-Benz, Audi, Volvo, Toyota, and Nissan have announced that they have started to conduct demonstration runs and actual road tests. Some have even stated that they plan to have commercially available vehicles by around 2020, making the appearance of the robot car on the market seem not that far off in the future. However, there still are a number of thorny problems that remain to be solved.
First of all, there is concern whether robot cars will cause their own special kind of accidents. In the world of aviation, autopilot technology has been adopted quickly, and airplanes these days are normally flown by autopilot except for takeoff and landing. But initially, pilots often had trouble coping with the switchover from automatic to manual operation, which caused various incidents. A similar situation is bound to arise in the case of robot cars. In my personal experience, while using an ACC system (without steering assist) on a highway, I have succumbed to the mistaken and dangerous notion that there would be no need to turn the steering wheel when encountering a curve. Until the arrival of robot cars that are solely designed for autonomous driving, such problems will most likely crop up.
Robot cars have the potential to greatly reduce fatigue in professional drivers of long-distance transport vehicles. But as reliance on driver skill decreases, it is easy to foresee labor problems arising in future.
The biggest challenge will be the required changes in various aspects of how our society is organized. For example, if a vehicle causes an accident during autonomous driving, how is responsibility to be assigned? Is the owner of the vehicle to blame, or is it the manufacturer? If all functions were operating normally but an accident has occurred anyway, must the authorities that allowed the use of the vehicle on public roads shoulder the blame? Such questions have already been raised and will no doubt be debated extensively in future, but clear answers have yet to be arrived at. Will the current system of damage and accident insurance be adequate? What about the ratio of liability if the other party was a manually operated car? These are just some of the many aspects that will have to be defined and clarified.
Nevertheless, the move towards the practical adoption of robot cars is probably unstoppable. Social discourse and discussion must therefore be further intensified and conducted in depth, in order to properly harness the potential of this new technology.
For more information on TDK products, visit the site here.⇒ Product Portal
TDK is a comprehensive electronic components manufacturer leading the world in magnetic technology
Share Share this article
RecommendedPeople who viewed this article also viewed here

Wonder Of Nature
vol.1 A New Cornerstone of Power Electronics
Knowledge Box
Vol.3 Wireless Power Transfer Systems for Wireless Healthcare Devices

World Athletics@TDK