
テクノ雑学
第112回 アシスト新基準 −再注目の電動アシスト自転車−

電動アシスト自転車の売れ行きが好調のようです。2008年は、日本国内で30万台以上が販売されたという統計が出ています。
好調の背景としては、まず、近年の健康志向、環境意識の高まりによる、プチ自転車ブーム的な傾向があげられるでしょう。燃料価格の高騰で、通勤などの自動車使用を控える傾向が出てきたこと、法改正によって駐車違反取締りが厳格化されたことなども、プチ自転車ブームの追い風になっていると考えられます。
宅配便会社やOA機器会社などでも、企業活動によるCO2排出量削減などを目的として、営業拠点周辺の巡回用に自転車を使うケースが増加中であるようです。
とはいえ、普通の自転車では上り坂などで辛いし、そうでなくてもペダルを漕ぐ力は少ないほうがいい……といったことで、電動アシスト自転車を選択するユーザーが増えているのだと考えられます。2008年12月1日には、アシスト力の新基準が施行され、ペダルを漕ぐ負担がいっそう低減されました。このことも、電動アシスト自転車への注目度を高めている理由のひとつでしょう。
法律に基づく名前の由来
さて、電動アシスト自転車の仕組みを理解するためには、法的な面に触れておく必要があります。歴史的背景も含めて、なるべく簡潔にまとめてみましょう。
公道上を走る“車両”は、道路交通法や道路運送車両法という法律で、「自動車」「原動機付自転車」「軽車両」に分類されています。自転車は、このうちの軽車両に該当します。
軽車両とは、具体的にはどのようなものなのでしょうか? 道路交通法第2条第1項第11号では、「エンジンやモータなどの原動機を持たず、人力や蓄力で動く乗り物や荷車など(ただし、身体障害者用の車いす、歩行補助車など、小児用の車以外)」と定義しています。自転車以外では、馬車や人力車、キックボードなどが軽車両に該当します。ちなみに歩行補助車とは、福祉用電動車両(シニアカー)などを指します。
あらためていうまでもありませんが、これらの軽車両は所有にかかる税金も、運転のための免許取得も不要です。
公道上を通行する車両は、安全を確保するため、分類ごとに定められる「道路運送車両の保安基準」に適合していなければなりません。当然、軽車両にも保安基準がありますが、大きさの制限と、「制動装置(ブレーキ)を備えなければならない」「乗用の場合は警音器を備えなければならない」程度です。日常生活のための道具であることから、必要最低限のレベルに留められているわけです。
道路交通法第2条第1項第11号の2では、自転車そのものが定義されています。「ペダルまたはハンド・クランクを用い、かつ、人の力により運転する2輪以上の車(レールにより運転する車を除く)であつて、身体障害者用の車いす、歩行補助車等及び小児用の車以外のもの(人の力を補うため原動機を用いるものであつて、内閣府令で定める基準に該当するものを含む)をいう」が、自転車の定義です。
細かくいうと、関連法規によって上記の「原動機」は電動機、つまりモータに限られていたり、さらに道路交通法第63条の3で「普通自転車」が定義されているのですが、ここでは詳細に触れません。簡単にいえば、「歩道上を通行できる自転車」の定義です。
さて、「電動“アシスト”自転車」という呼称には、ある意味が込められています。ポイントは、直前にあげた「人の力を補うため原動機を用いるものであつて、内閣府令で定める基準に該当するものを含む」の文言です。
軽車両である自転車は、あくまで人の力によって動くものでなければならず、モータは「人の力を補う」ことを超えて機能してはならないのです。これこそが、「電動自転車」ではなく「電動“アシスト”自転車」と呼ばれる理由です。
■ 電動アシスト自転車のルーツ
世界初の電動アシスト自転車は、1993年に市販されました。その際、開発側と関係省庁の間では、その位置付けについて多くの議論と検討が重ねられたと聞いています。なにしろ世界初の製品ですから、道路・交通関連法規上で、どのように扱うべきか?というところから決めていく必要があったわけです。
電動アシスト自転車は、交通弱者層の移動の負担軽減などを目的に、「上り坂などでも楽にペダルが漕げる自転車」として企画・開発されたものです。構造的に、ペダルを漕がなければモータの力は発生しません。あくまで主体は人力ですから、「人力で動く」という、軽車両の定義に適合すると判断していいはずです。
原付扱いになってしまうと、歩道上を通行できません。それでは交通弱者層の助けにならないのです。電動アシスト自転車が、法規上「自転車」として認められるか否かは、存在意義に関わってくる問題だったのです。
結果として、「モータの力は、いかなる状態でも人間の力を超えない」ことが、「人の力を“補う”」ことと定義されました。走行のために用いられるモータの力は、人の力1に対して、1を超えない。駆動力全体を100とするなら、その比率は最大で人力50:モータ50であることが、電動アシスト自転車を「自転車」と見なす基準として決められたのです。
■ 構造と従来の弱点克服
さて、ここからが仕組みの話です。電動アシスト自転車を構成する要素は、以下のようにまとめられます。
- 通常の自転車を構成する部品(フレーム、ホイール、サドルなど)
- 人がペダルを漕ぐ力(ペダル踏力)を検出する装置
- 車速を検出する装置
- 補助動力(アシスト)用のモータ
- モータに電力を供給する蓄電池
- モータ回転の減速機構
- モータの出力調整など、システム全体の制御機構
- 法規、基準遵守のための制御機構
- 特定の条件下で、アシスト機構を切り離す装置
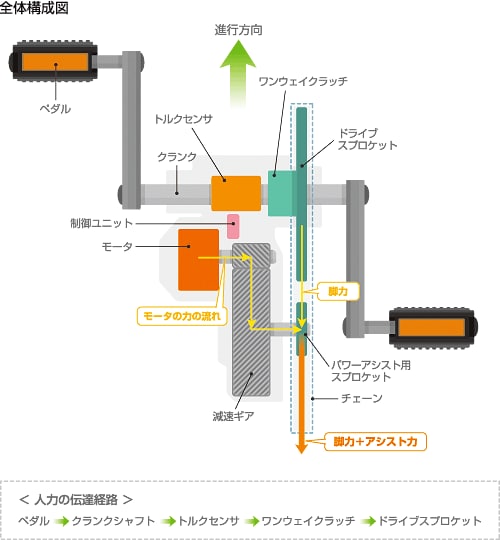 |
システムとしての完成度を左右する大きなポイントになるのが、ペダル踏力を検出する装置(トルクセンサ)です。
人間が自転車のペダルを踏むと、自転車のクランク軸にはその反力(トルク)が発生します。反力はペダル踏力に比例して大きくなりますから、反力トルクの大きい状態は、すなわち人間がペダルを強く踏み込んでいる状態と判断できます。
このトルクを検出し、車速と照合することで、走行状況がある程度判断できます。たとえば、車速が低いのにトルクが大きい状態は、発進直後、上り坂、もしくは荷物をたくさん積んでいる状態などと推測でき、モータによるアシストが必要な状況と判断できるわけです。
初期の電動アシスト自転車が搭載していたトルクセンサは、少々複雑な機構でした。たとえば初代ヤマハPASのトルクセンサは、クランクと同軸上に設置した遊星歯車機構でペダル踏力を分割します。一方は直接の駆動力として使い、もう一方は力が伝わる先に備えたポテンシオメータで、トルク量を検出するために使うという仕組みでした。
しかし、この構造では、遊星歯車を同時に動かさなければならない分、クランクを回転させるのに必要な力が大きくなります。つまり、ペダルが重くなってしまいます。ほかの機構も考案されてきましたが、機械的機構を用いている以上、程度の差こそあれ、ペダルが重くなってしまうことに変わりはありません。
モータのアシストがあるうちは、少々ペダルが重くてもかまわないのですが、問題はアシスト力がゼロの状態です。アシスト力がゼロになるのは、システムがアシスト不要と判断している状態、もしくは車速が時速24km以上になった時ですから、これもまあ、特に問題とはいえません。問題は、電池切れによるアシスト不能状態です。
初期の電動アシスト自転車は、電池が切れてしまうと、「普通の自転車」になるのではなく、「たいへん重い自転車」になってしまうのが、最大の弱点でした。トルクセンサの抵抗に加えて、メーカーによってはアシスト機構の構造から、脚力でモータを回転させながら走るという、本末転倒な状態になってしまうこともありました。
また、当時、搭載していた充電池は鉛蓄電池で、これも容量の割に重量がかさみます。アシスト機構や電池の搭載で重量が増加する分、車体側も頑丈にしておく必要があることで、さらに重量は増加します。
標準的な「ママチャリ」の類の重量が12〜15kg程度なのに対し、初期の電動アシスト自転車は30kg近くもありました。さらに各種の抵抗分まで、脚力だけでフォローしなければならないのですから、その重さたるや……。
しかし、現在の電動アシスト自転車では、そのような弱点はほとんど解消されています。まず、2003年ごろから、トルクセンサが非接触式となりました。ここでは、最新のヤマハPASが搭載するトルクセンサの構造を例に説明します。
■ 磁歪(じわい)効果を利用したトルクセンサ
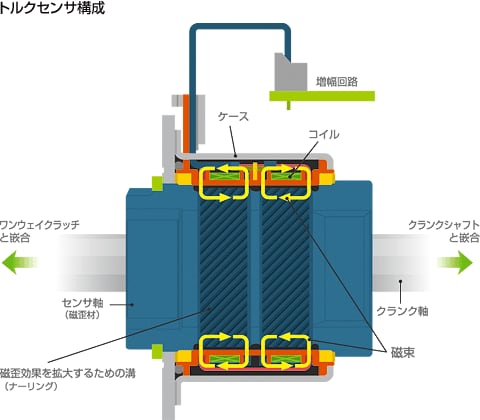
現在のトルクセンサは、「磁歪(じわい)効果」を利用することで、機械的な接触なしにトルクを検出しています。磁歪効果とは、ある種の磁性体が持つ、磁場を印加することで長さが変化する性質のことです。より正確にいうなら、トルクセンサが利用しているのは、磁性体に力を加えることで磁場が生じる「逆磁歪効果」で、これは「ビラリ効果」と呼ばれています。
トルクセンサは、磁歪効果を持つ材料(磁歪材)と「検出用コイル」で構成されています。磁歪材は、片側がクランク軸に直接噛み合い、反対側はクランク逆回転時にトルクセンサを機能させないためのワンウエイクラッチに噛み合っています(その先にドライブスプロケットが接合されています)。磁歪材と検出用コイルは、クランク側とワンウエイクラッチ側にそれぞれ1セットずつが配されています。
ペダル踏力は、クランク軸側から磁歪材に伝わります。その力によって、磁歪材にはビラリ効果がはたらき、透磁率(磁力線の通しやすさ)が変化します。また、磁歪材にかかる力は、クランク側のほうがワンウエイクラッチ側より大きいので、それぞれの側の透磁率には差が生じます。
検出用コイルには、「電磁誘導」効果によって「誘導起電力」が生じているのですが、透磁率の差によって、クランク側とワンウエイクラッチ側では起電力にも差が生じます。この大きさの差を、トルク=ペダル踏力の大きさとして判断しているのです。
非接触式トルクセンサを得たことで、ペダル踏力は通常の自転車と同等レベルまで軽減できました。現在の電動アシスト自転車は、その他にもアシストがかからない「自転車走」状態での負荷を軽減するため、さまざまな工夫が盛り込まれています。
たとえば車速は、抵抗を増やさず正確に検出できるよう、モータの回転数などから判断しています。アシスト力が働かない状態では、ワンウェイクラッチによってモータの回転が駆動系から切り離されます。蓄電池はニッケル水素やリチウムイオンを採用し、蓄電容量に対する重量を低減しています。制御用コンピュータの基板も集積度を高めて小型軽量化し、フレームもアルミ化するなどして全体の重量を抑え、万一電池が切れても、普通の自転車として走れるようにしているのです。
モータの位置は、システムによってさまざまなバリエーションがあります。現在のヤマハPASが採用しているのは、クランク軸直近にモータを配して、そこからチェーンに駆動力を伝える「センターマウント方式」です。重量物であるモータやバッテリなどを、車体中心付近に集中配置することで重量配分を適正化し、基本的な走行性能に影響を与えないことが、そのメリットとされています。
これに対して、モータを後輪軸受け(ハブ)部分に配するものもあります。こうすることで、ハブ以外は通常の自転車用パーツが使えるというメリットがあります。逆にモータを前輪ハブに備え、アシスト力が前輪を駆動する方式もあります。この場合、制動時にモータの極性を切り替え、発電機として使うことで「エネルギー回生」が実現でき、発電した電力を充電池に貯えることで、アシスト走行可能な距離を延長できるメリットがあります。
最新技術として、一部のメーカー製品では、変速ギアの位置によってアシスト量の制御内容を変えるような仕組みを備えるものがあります。また、平坦な道ではアシストを最小限に抑えるような「節電モード」を持つものもあります。これらの技術によって、電池の消耗がより抑えられ、アシスト可能な走行距離を伸ばしているのです。
■ アシストの新しいスタンダード
 |
最後に、「アシスト新基準」についても触れておきましょう。
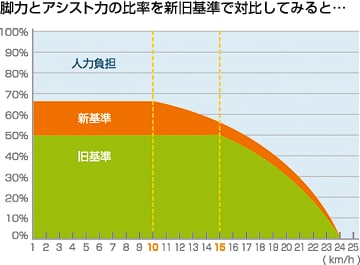
前述の通り、これまでの電動アシスト自転車では、人力とモータによるアシスト力の大きさは最大で1:1、比率でいえば50:50と定められていました。新基準では、人力の2倍までのアシスト力、比率でいえば約67%までが許容されます。ただし、この比率が適用できるのは時速10kmまでに限られています。
時速10kmから、アシスト力がゼロになる時速24km(旧基準でも一緒)までの間は、速度から10を引いて7で割ったものから、さらに2を引いた数値が、人力に対するアシスト率の上限になります。
たとえば時速16kmの時のアシスト比率を計算すると、旧基準では47%なのに対して新基準では53%、時速22kmでは旧基準18%に対して新基準22%と、速度が高まるにつれてその差が小さくなってきます。
これは、アシスト力に新基準を採用した理由とも大きく関わっています。昨今、「自転車は基本的に車道を走る」といった法令遵守と、そのための指導などの強化が行なわれていることはご存知でしょう。
発進から時速10kmまでのアシスト力を増やしたのは、その対策という意味も含まれています。女性や高齢者など、脚力の弱い人が自転車を運転する際、発進や坂道走行時などでペダルを強く踏み込むと、その反動で進路がふらついてしまうことがあります。
そのような状態のペダル踏力を軽減することで、ふらつきなどを防ぎ、多くの人が安定して走行できるようにすることが、新基準アシストのおもな目的なのです。
なお、海外製品の中には、電動モータの力が基準を超えて働いたり、果てはモータの力だけで駆動できるものがあります。日本国内でも流通していますが、そのような製品は原付扱いになります。そうと知らなかった場合でも、無免許、無登録や、保安基準を満たさない状態はもちろんのこと、ヘルメット未着用での乗車や歩道上走行は、道交法違反に問われることになりますから、十分に注意してください。
著者プロフィール:松田勇治(マツダユウジ)
1964年東京都出身。青山学院大学法学部卒業。在学中よりフリーランスライター/エディターとして活動。
卒業後、雑誌編集部勤務を経て独立。
現在はMotorFan illustrated誌、日経トレンディネットなどに執筆。
著書/共著書/編集協力書
「手にとるようにWindows用語がわかる本」「手にとるようにパソコン用語がわかる本 2004年版」(かんき出版)
「記録型DVD完全マスター2003」「買う!録る!楽しむ!HDD&DVDレコーダー」「PC自作の鉄則!2005」(日経BP社)
「図解雑学・量子コンピュータ」(ナツメ社)など
TDKは磁性技術で世界をリードする総合電子部品メーカーです
Share この記事を共有する
Recommendedこの記事を見た人はこちらも見ています
テクノ雑学
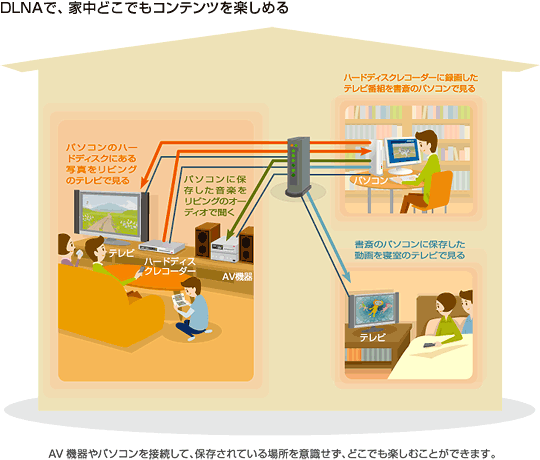
第113回 DLNAとは?録画したテレビ番組を家中どこでも楽しもう!
テクノ雑学
第114回 改めて知るその機能性 −マウスの進化−

テクノロジーの進化:過去・現在・未来をつなぐ
【徹底解説】データセンター(DC)アーキテクチャ:定義・階層・現代インフラにおける役割
PickUp Contents

